收球率作為衡量電廠(chǎng)凝汽器膠球清洗PLC控制的一項重要指標導致收球率低原因分析
收球率作為衡量電廠(chǎng)凝汽器膠球清洗PLC控制的一項重要指標導致收球率低原因分析。隨著(zhù)電廠(chǎng)單元機組規模的日趨大型化,對自動(dòng)化水平的要求也越來(lái)越高。火力發(fā)電廠(chǎng)凝汽器膠球清洗控制系統的投運,可使熱力系統安全、經(jīng)濟運行。
以F?-60MR可編程序控制器為核心組成的電廠(chǎng)凝汽器膠球清洗PLC控制系統,改善了以往分離元件控制系統安全、可靠性差的弱點(diǎn),在現場(chǎng)實(shí)施中體現了以下優(yōu)點(diǎn):先是運算器、控制器、存儲器三大部件被簡(jiǎn)化,輸入、輸出組件功能強。采用了多種用接口,以適應各種工業(yè)用途的控制對象。本控制系統使用了功能表圖、繼電器邏輯、符號語(yǔ)言、用語(yǔ)句等進(jìn)行程序控制,編程直觀(guān)、易于掌握。可編程控制器以編程軟連接的方式,代替了大量的硬連接電器,從而簡(jiǎn)化了電路結構,更具有在線(xiàn)修改功能。F?-60MR有36個(gè)輸入點(diǎn)、24個(gè)輸出點(diǎn),可進(jìn)一步擴充,多可擴至120點(diǎn)。
其次,可編程序控制器的一個(gè)優(yōu)點(diǎn)是可靠性高。工業(yè)生產(chǎn)一般要求控制設備具有很強的抗干擾能力,能在惡劣環(huán)境下可靠地工作。F?-60MR在硬件上采用了模塊式結構,有利于查找故障并及時(shí)修復。此外還采用了隔離、屏蔽等防干擾措施,有較強的自診斷功能,可檢測出計算機的CPU、存儲器異常及程序錯誤等。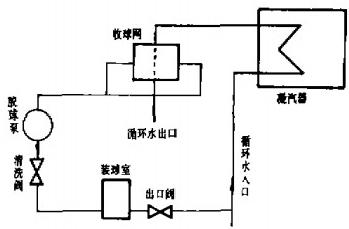
1膠球清洗工作原理及現場(chǎng)要求
電廠(chǎng)凝汽器水側換熱面上污垢的積聚,不僅惡化了真空,降低了汽輪機的熱效率,而且會(huì )引起銅管腐蝕、泄漏,嚴重時(shí)會(huì )威脅汽輪機的安全運行。尋求有效的方法防止凝汽器管側換熱面積聚污垢和在已結垢的情況下尋求理想的清洗方法,就成了各國動(dòng)力工作者的一個(gè)課題。
電廠(chǎng)凝汽器膠球清洗的PIC控制系統可在機組運行過(guò)程中不需改變負荷的情況下進(jìn)行工作,而且有能耗小、效果好,設備簡(jiǎn)單、操作方便等優(yōu)點(diǎn)。
電廠(chǎng)凝汽器膠球清洗系統如圖1所示。密度與水相近的海綿膠球(用天然橡膠或合成樹(shù)脂制成)裝人球室后,啟動(dòng)膠球泵可以將膠球用比循環(huán)水壓力高的水流送入凝汽器水室。膠球直徑雖比銅管內徑大1~2mm,但因是多孔柔軟的彈性體,很容易被水流帶入銅管,并被壓縮成卵形。膠球在行進(jìn)過(guò)程中抹去管壁上的污垢,流出管壁時(shí),依靠自身的彈力彈掉表面的污垢,并隨循環(huán)水流人收球室,然后被膠球泵重新送人凝汽器。
圖1電廠(chǎng)凝汽器膠球清洗系統圖
現場(chǎng)既要求保證除垢效果,又要保證收球率,使其不低于90%。
2控制系統軟、硬件設計及調試
電廠(chǎng)凝汽器膠球清洗的PIC控制,其工作狀態(tài)可分為反洗態(tài)、清洗態(tài)、收球態(tài)及故障。控制系統出現故障(主要是執行機構)應立即采取必要的保護措施同時(shí)故障指示燈亮,待運行入員進(jìn)行必要的維護后,消除設備故障,重新投入運行。
根據電廠(chǎng)運行需要,本設計具有手動(dòng)、手控和程控三種方式。手控是對熱力系統進(jìn)行由反洗(或清洗)狀態(tài)開(kāi)始“反洗→清洗→一次收球→暫停→二次收球→反洗”的程序控制過(guò)程,啟動(dòng)手控只進(jìn)行一次循環(huán),后回到反洗狀態(tài)。而根據現場(chǎng)情況可選擇程控運行方式,啟動(dòng)按鈕后控制系統進(jìn)行周而復始的循環(huán)。手動(dòng)方式主要用于調試維修階段。各種運行方式的相互切換都可以在反洗或清洗狀態(tài)下進(jìn)行。反洗、清洗及收球時(shí)間可根據運行入員要求通過(guò)編程器設定。
系統在程控或手控運行方式且處于清洗過(guò)程時(shí),若出現收球網(wǎng)前后差壓越限,系統自動(dòng)轉入收球狀態(tài),進(jìn)行反洗,這樣可以清除附在收球網(wǎng)上的污物.保護收球網(wǎng)。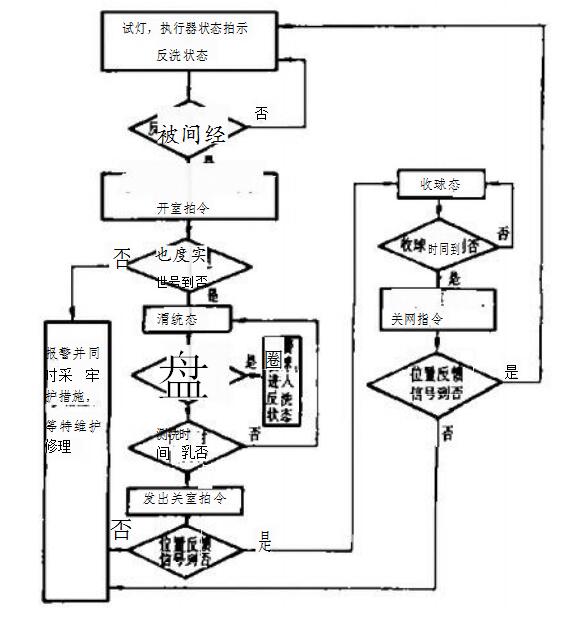
控制框圖如圖2所示。圖中位置反饋信號到達時(shí)間是根據設備動(dòng)作時(shí)間確定的,具體根據執行機構結合現場(chǎng)情況進(jìn)行設定,如開(kāi)關(guān)網(wǎng)計時(shí)器設定為90s。
圖2電廠(chǎng)凝汽器膠球清洗控制框圖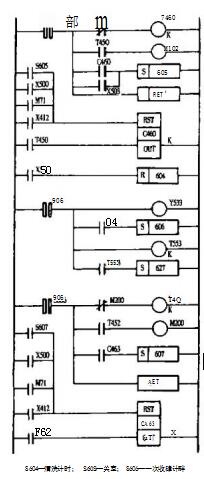
收球率作為衡量電廠(chǎng)凝汽器膠球清洗PLC控制的一項重要指標,是設計時(shí)必須考慮的問(wèn)題。導致收球率低的原因主要有;①循環(huán)水中雜物多,這可以通過(guò)改善一、二次濾網(wǎng)來(lái)解決;②設備缺陷,如膠球經(jīng)過(guò)的地方有死角、盲孔、串縫和回流區、銅管伸出管板過(guò)多或管壁有局部壓痕,收球網(wǎng)設計不當等,這些在選購安裝時(shí)應充分考慮;③清洗閥、出口閥、膠球泵的關(guān)停次序對收球率也有影響,順序、時(shí)間應結合實(shí)際情況進(jìn)行選定。這樣才能達到良好的效果。
膠球清洗和反洗時(shí)間根據現場(chǎng)要求通常為幾十min甚至幾h,F?-60MR的定時(shí)器T大計時(shí)時(shí)間為999s,大約是16.5min。這樣滿(mǎn)足不了現場(chǎng)要求。本控制系統采用了計數器C與定時(shí)器T聯(lián)合計時(shí)的方法,計時(shí)范圍為999×999s,解決丁計時(shí)時(shí)間問(wèn)題(見(jiàn)圖3)。另外,F?-60MR的定時(shí)器可以重復使用,只要正確送入K值即可。
硬件上,可編程控制器的9路輸入用作執行機構的位置反饋信號,16路輸入作為手動(dòng)控制信號及試燈.系統復位、差壓報警、手程控選擇等。輸出4路作圖3清洗及一次收球計時(shí)梯形圖為運行狀態(tài)指示,另外10路是位置指示,剩下10路是指令輸出。收球網(wǎng)位置反饋比較特殊,反饋信號間斷送出,使狀態(tài)容易混亂,所以在此加了一個(gè)定時(shí)器T554。
可編程序控制器F?-60MR在電廠(chǎng)凝汽器膠球清洗系統中的運行,效果好,充分顯示出其功能較強、構造簡(jiǎn)單、可靠性高等特點(diǎn)。系統運行情況良好,狀態(tài)正常,達到了預期目的。
在運行過(guò)程中發(fā)現,現場(chǎng)對電廠(chǎng)凝汽器膠球清洗的PLC控制的投運是定時(shí)定次的,也就是根據熱力系統結垢程度定時(shí)定次數啟動(dòng)。這樣在今后設計中就可以把手控、程控合二為一。設定一個(gè)循環(huán)次數就可滿(mǎn)足要求。

